图像语义分割综述
转发自:https://zhuanlan.zhihu.com/p/37801090 | 作者:stone | 如有侵权请联系博主删除
一、什么是语义分割
语义分割是在像素级别上的分类,属于同一类的像素都要被归为一类,因此语义分割是从像素级别来理解图像的。比如说如下的照片,属于人的像素都要分成一类,属于摩托车的像素也要分成一类,除此之外还有背景像素也被分为一类。注意语义分割不同于实例分割,举例来说,如果一张照片中有多个人,对于语义分割来说,只要将所由人的像素都归为一类,但是实例分割还要将不同人的像素归为不同的类。也就是说实例分割比语义分割更进一步。

图1(a). 原图

图1(b). 分割结果
二、语义分割的思路
I.传统方法
在深度学习方法流行之前,TextonForest和基于随机森林分类器等语义分割方法是用得比较多的方法。不过在深度卷积网络流行之后,深度学习方法比传统方法提升了很多,所以这里就不详细讲传统方法了。
II.深度学习方法
深度学习方法在语义分割上得到了巨大成功,深度学习方法解决语义分割问题可以概括为几种思路。下面进行详细介绍。
1.Patch classification
最初的深度学习方法应用于图像分割就是Patch classification。Patch classification方法,顾名思义,图像是切成块喂给深度模型的,然后对像素进行分类。使用图像块的主要原因是因为全连接层需要固定大小的图像。
2.全卷积方法
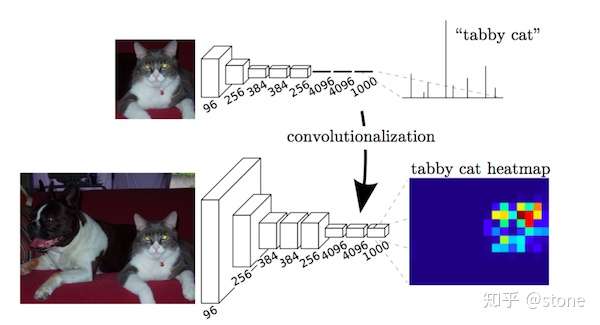
2014年,全卷积网络(FCN)横空出世,FCN将网络全连接层用卷积取代,因此使任意图像大小的输入都变成可能,而且速度比Patch classification方法快很多。
尽管移除了全连接层,但是CNN模型用于语义分割还存在一个问题,就是下采样操作(比如,pooling)。pooling操作可以扩大感受野因而能够很好地整合上下文信息(context中文称为语境或者上下文,通俗的理解就是综合了更多的信息来进行决策),对high-level的任务(比如分类),这是很有效的。但同时,由于pooling下采样操作,使得分辨率降低,因此削弱了位置信息,而语义分割中需要score map和原图对齐,因此需要丰富的位置信息。
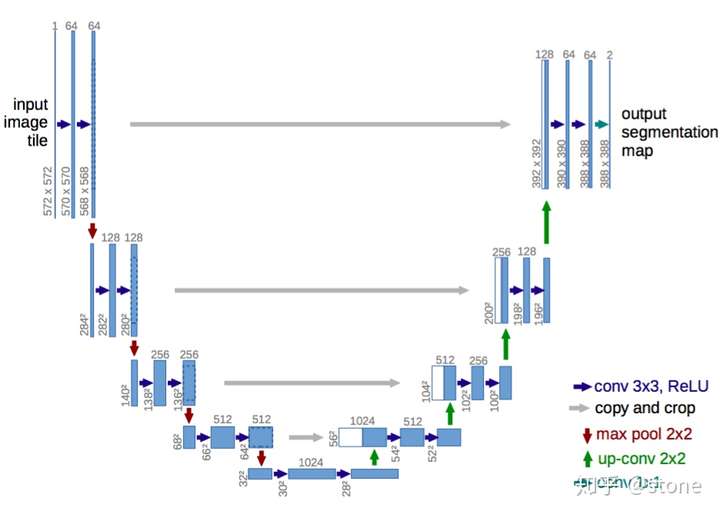
3.encoder-decoder架构
encoder-decoder是基于FCN的架构。encoder由于pooling逐渐减少空间维度,而decoder逐渐恢复空间维度和细节信息。通常从encoder到decoder还有shortcut connetction(捷径连接,也就是跨层连接)。其中U-net就是这种架构很流行的一种,如下图:
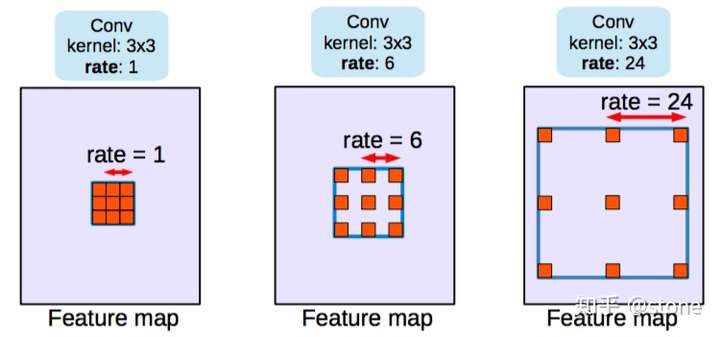
4.空洞卷积
dilated/atrous (空洞卷积)架构,这种结构代替了pooling,一方面它可以保持空间分辨率,另外一方面它由于可以扩大感受野因而可以很好地整合上下文信息。如下图:
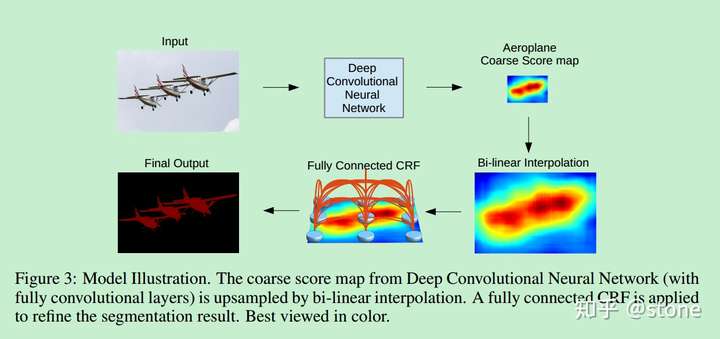
5.条件随机场
除了以上思路,还有一种对分割结果进行后处理的方法,那就是条件随机场(Conditional Random Fields (CRFs))后处理用来改善分割效果。DeepLab系列文章基本都采用这种后处理方法,可以较好地改善分割结果,如下图:
三、深度学习语义分割方法
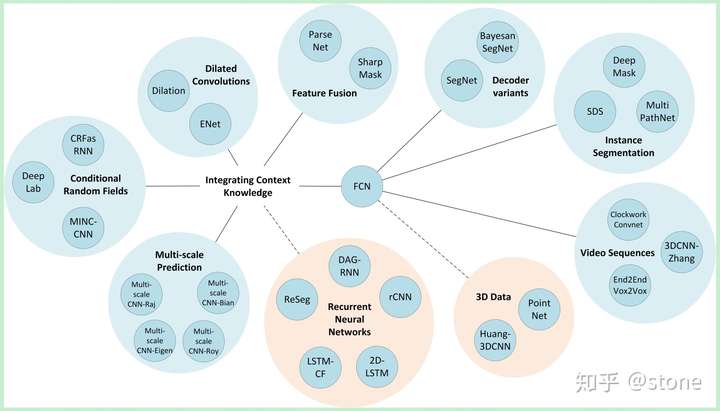
方法总览
现在的深度学习语义分割模型基本上都是基于FCN发展而来的,它是开山鼻祖,一张图概括FCN的延伸方法:
各方法的详细信息
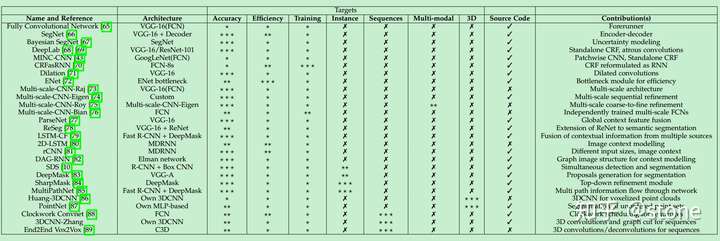
各方法简要介绍
下面简单总结一些从FCN进行改进的几种架构,关于每种架构的详细解读请看专栏中其他文章。
1.FCN
论文信息
Fully Convolutional Networks for Semantic Segmentation
Submitted on 14 Nov 2014
Arxiv Link
主要贡献
- 使端对端的卷积语义分割网络变得流行起来。
- 通过deconvolutional layers进行上采样。
- 通过skip connection改善了上采样的粗糙度。
概要
- 全卷积化(Fully Convolutional):用于解决逐像素(pixel-wise)的预测问题。通过将基础网络(例如VGG)最后面几个全连接层换成卷积层,可实现任意大小的图像输入,并且输出图像大小与输入相对应;
- 反卷积(deconvolution) :上采样操作,用于恢复图片尺寸,方便后续进行逐像素预测;
- 跳跃结构(skip architecture):用于融合高低层特征信息。通过跨层连接的结构,结合了网络浅层的细(fine-grain)粒度信息信息以及深层的粗糙(coarse)信息,以实现精准的分割任务。
Benchmarks (VOC2012)

评论:
FCN是基于深度学习的语义分割的开山之作,尽管现在很多方法都超越了FCN,但它的思想仍然有很重要的意义。
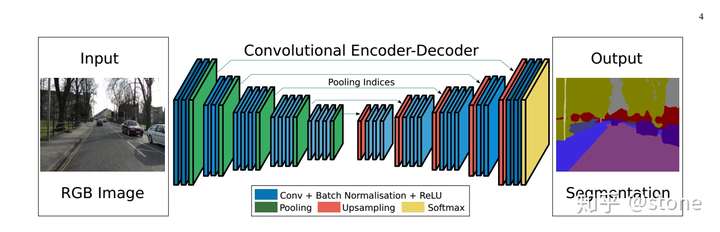
2. Segnet
论文信息
SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation
Submitted on 2 Nov 2015
Arxiv Link
主要贡献
- 使用Maxpooling indices来增强位置信息。
简要概述
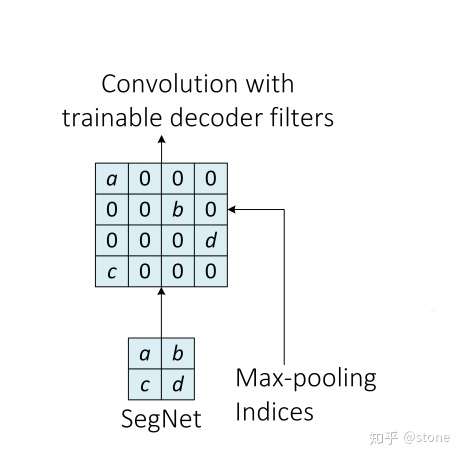
FCN的upconvolution层+shortcut connections产生的分割图比较粗糙,因此SegNet增加了更多的shortcut connections。不过,SegNet并不是直接将encoder的特征进行直接复制,而是对maxpooling中的indices进行复制,这使得SegNet的效率更高。
maxpooling 的indices复制原理如下:
Benchmarks (VOC2012)

评论
- FCN和SegNet都是encoder-decoder架构。
- SegNet的benchmark表现太差了,不建议用这个网络。
3. Dilated convolution
论文信息
Multi-Scale Context Aggregation by Dilated Convolutions
Submitted on 23 Nov 2015
Arxiv Link
创新点
- 使用空洞卷积用来进行稠密预测(dense prediction)。
- 提出上下文模块(context module),使用空洞卷积(Dilated Convolutions)来进行多尺度信息的的整合。
简要解释
pooling操作可以增大感受野,对于图像分类任务来说这有很大好处,但由于pooling操作降低了分辨率,这对语义分割来说很不利。因此作者提出一种叫做dilated convolution的操作来解决这个问题。dilated卷积(在deeplab中称为atrous卷积)。可以很好地提升感受野的同时可以保持空间分辨率。
网络架构有两种,一种是前端网络,另外一种是前端网络+上下文模块,分别介绍如下:
- 将VGG网络的最后两个pooling层给拿掉了,之后的卷积层被dilated 卷积取代。并且在pool3和pool4之间空洞卷积的空洞率=2,pool4之后的空洞卷积的空洞率=4。作者将这种架构称为前端(front-end)。
- 除了前端网络之外,作者还设计了一种叫做上下文模块(context module)的架构,加在前端网络之后。上下文木块中级联了多种不同空洞率的空洞卷积,使得多尺度的上下文信息可以得到整合,从而改善前端网络预测的效果。需要注意的是前端网络和上下文木块是分开训练的,因为作者在实验中发现,如果是联合在一起进行端对端的训练并不能改善性能。
Benchmarks (VOC2012)
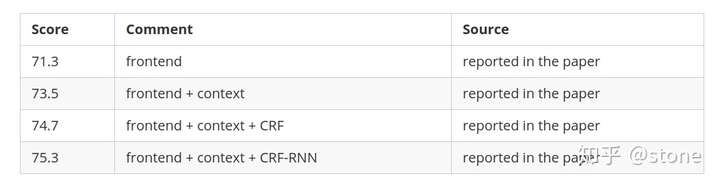
评论
需要特别注意的是,网络输出的分割图并不是和原始图像大小一样的,而是其1/8,需要对输出的分割图进行线性插值才能得到最终的分割结果。这种做法也是很多其他的方法都使用的。
4. DeepLab(v1,v2)
论文信息
v1: Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs
Submitted on 22 Dec 2014
Arxiv Link
v2 : DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
Submitted on 2 Jun 2016
Arxiv Link
主要贡献
- 使用atrous卷积,也就是后来的空洞卷积,扩大感受野,保持分辨率。
- 提出了atrous spatial pyramid pooling (ASPP),整合多尺度信息。
- 使用全连接条件随机场(fully connected CRF)进行后处理,改善分割结果。
简要概述
- 空洞卷积可以在不增加参数的情况下增加感受野。
- 通过两种方式来进行多尺度的处理:A.将原始图像的多种尺度喂给网络进行训练。B.通过平行的不同空洞率的空洞卷积层来获得。
- 通过全连接条件随机场来进行后处理,以改善分割结果。
Benchmarks (VOC2012)

5. RefineNet
论文信息
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
Submitted on 20 Nov 2016
Arxiv Link
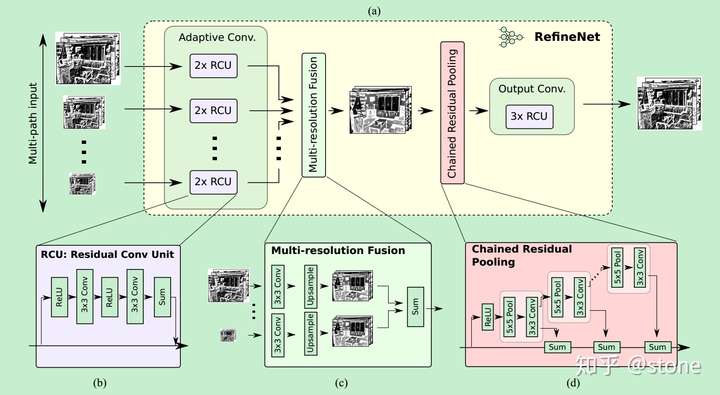
主要贡献
- 精心设计了encoder-decoder架构中的decoder部分,使得性能提升。
- 整个网络的设计都遵循residual connections,网络表达能力更强,梯度更容易反向传播。
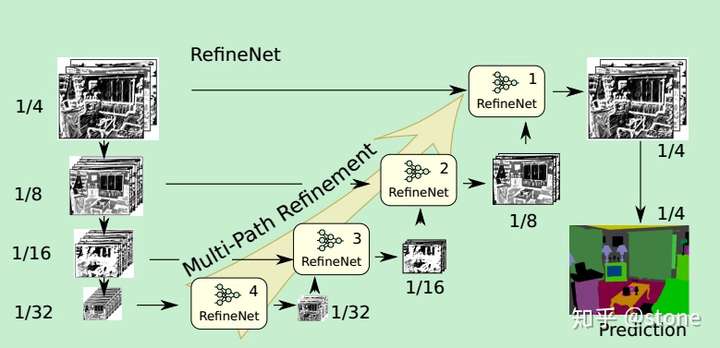
简要概述
作者提出空洞卷积方法应用于语义分割也是有缺点的,包括:
- 因为使用了大分辨率的feature map,因此计算代价大,并且需要大量的内存。对于这个问题,DeepLab的做法是只预测原始输入的1/8。
本文提出使用encoder-decoder架构。encoder部分是RESNET-101。decoder具有RefineNet blocks,它将此前的RefineNet blocks的低分辨率特征和encoder部分高分辨率特征进行concatenate/fuse。
Benchmarks (VOC2012)

6. PSPNet
论文信息
Pyramid Scene Parsing Network
Submitted on 4 Dec 2016
Arxiv Link
主要贡献
- 使用pyramid pooling整合context。
- 使用auxiliary loss。
概要
骨架网络使用Resnet,并在此基础上加上pyramid pooling module。该模块用到了很多kernel大小不一的pooling 。将pooling的结果再上采样,经过concatenate进行融合。
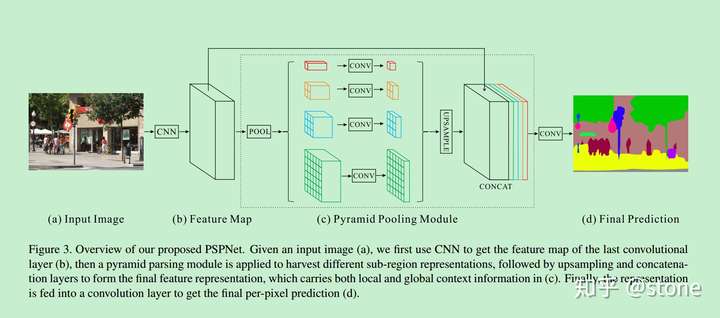
在RESNET的第四阶段(即输入到金字塔池模块)之后,应用auxiliary loss。这种方法在别的地方也被称为intermediate supervision。
Benchmarks (VOC2012)

参考
这篇文章主要是参考以下两篇文章的一个总结,加入了一些自己的理解,想看原文的直接打开:
- A 2017 Guide to Semantic Segmentation with Deep Learning
- A Review on Deep Learning Techniques Applied to Semantic Segmentation
